-
關(guān)于研旭
于研旭")
-
-
品展示")
-

-


支持")
品展示")
產(chǎn)品展示
PRODUCTS
基于快速原型控制的5自由度磁懸浮軸承實驗系統(tǒng)
關(guān)鍵詞:
磁懸浮軸承
電磁軸承
飛輪儲能
高速電機(jī)
高速軸承
主動磁軸承
所屬分類:
解決方案
開放式儲能控制系統(tǒng)平臺
機(jī)電測控臺架
聯(lián)系我們
產(chǎn)品描述
在現(xiàn)代工業(yè)與科技迅猛發(fā)展的進(jìn)程中,高速大慣量旋轉(zhuǎn)機(jī)械廣泛應(yīng)用于航空航天、高端裝備制造、能源電力等眾多關(guān)鍵領(lǐng)域。在這些旋轉(zhuǎn)機(jī)械里,軸承作為核心部件,其性能優(yōu)劣直接關(guān)乎設(shè)備的整體運行質(zhì)量與穩(wěn)定性。傳統(tǒng)機(jī)械軸承在高速運轉(zhuǎn)時,因存在機(jī)械接觸,不可避免地會產(chǎn)生摩擦與磨損,這不僅降低了系統(tǒng)效率,還增加了能耗,限制了設(shè)備的轉(zhuǎn)速與精度提升,嚴(yán)重時甚至?xí)l(fā)故障,導(dǎo)致高昂的維修成本與生產(chǎn)停滯。
隨著科技發(fā)展對設(shè)備性能要求的不斷攀升,研發(fā)新型高性能軸承迫在眉睫。磁懸浮軸承應(yīng)運而生,它利用電磁力將轉(zhuǎn)子無接觸地懸浮起來,徹底消除了機(jī)械接觸帶來的摩擦與磨損問題。憑借高精度、高轉(zhuǎn)速、低能耗、長壽命等顯著優(yōu)勢,磁懸浮軸承在諸多前沿領(lǐng)域展現(xiàn)出巨大的應(yīng)用潛力,成為推動現(xiàn)代高端裝備技術(shù)革新的關(guān)鍵因素。 然而,磁懸浮軸承系統(tǒng)是一個高度復(fù)雜的機(jī)電一體化系統(tǒng),涉及電磁學(xué)、控制理論、機(jī)械設(shè)計等多學(xué)科知識。其性能受電磁參數(shù)、控制算法、機(jī)械結(jié)構(gòu)等多種因素的綜合影響,且各因素之間相互耦合,關(guān)系錯綜復(fù)雜。為了深入探究磁懸浮軸承的運行機(jī)理,優(yōu)化系統(tǒng)性能,確保其在實際應(yīng)用中的可靠性與穩(wěn)定性,一套先進(jìn)且完善的磁懸浮軸承試驗系統(tǒng)就顯得尤為重要。對此,南京研旭電氣科技有限公司在多年動模平臺經(jīng)驗的基礎(chǔ)上,結(jié)合電磁軸承磁懸浮飛輪系統(tǒng)合作方,構(gòu)建基于快速原型控制的五自由度磁懸浮軸承試驗系統(tǒng)。通過此平臺,研究人員可以快速掌握電磁軸承五自由度控制特性,驗證相關(guān)控制算法,可以縮短研究和開發(fā)周期、節(jié)省研究經(jīng)費,可以展開全面深入的研究,具有重要的現(xiàn)實意義。
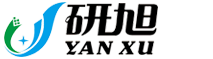
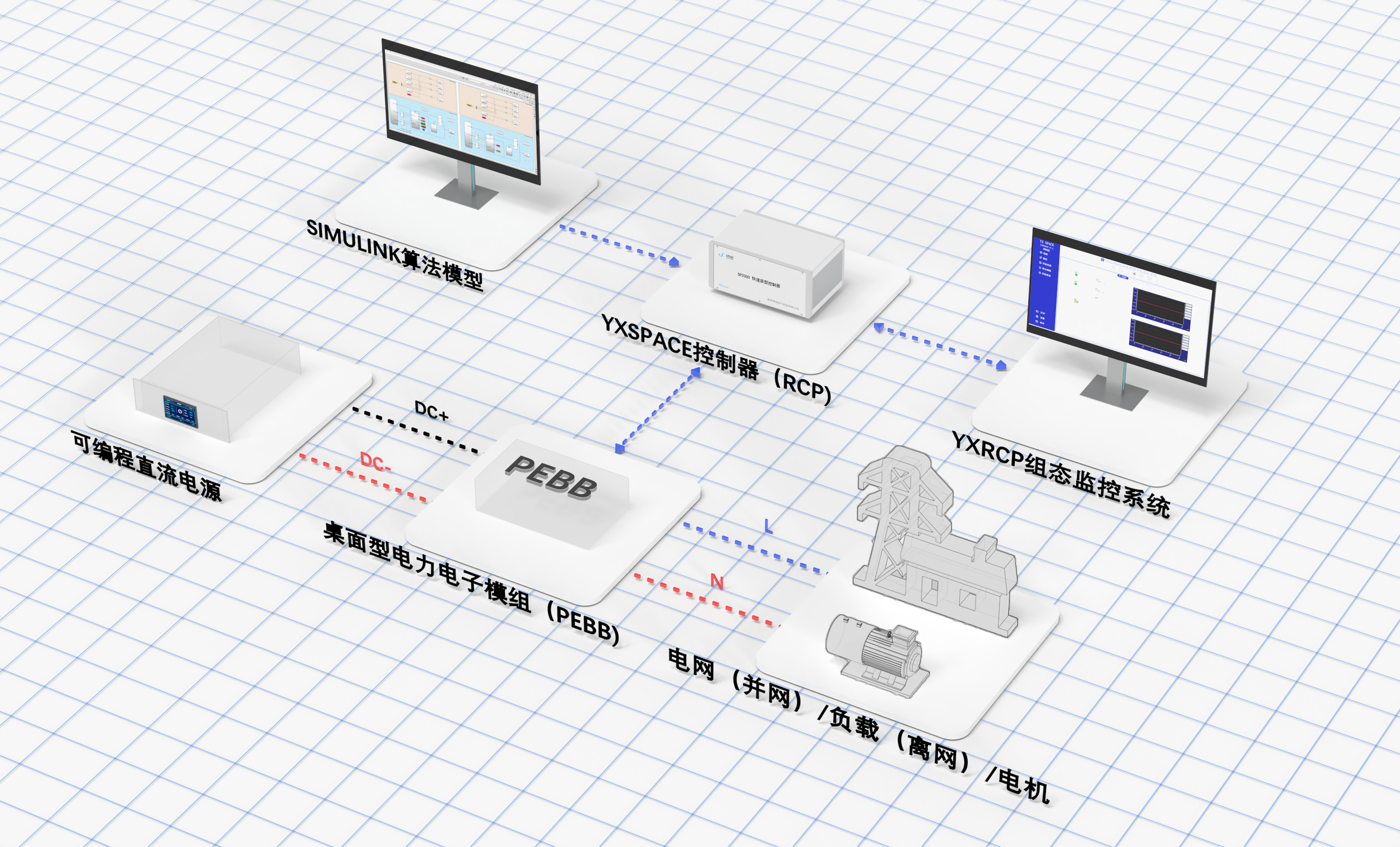
基于快速原型控制的五自由度磁懸浮軸承實驗系統(tǒng)主要由磁軸承測試臺架、功率驅(qū)動器、快速原型控制器、基于模型開發(fā)快速原型監(jiān)控系統(tǒng)、開放式功率硬件開發(fā)系統(tǒng)組成,高精度可編程直流電源組成,其系統(tǒng)拓?fù)淙缦聢D所示。
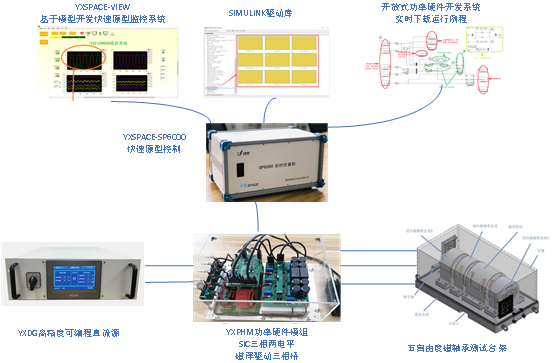
圖1 基于快速原型控制的5自由度磁懸浮軸承實驗系統(tǒng)
系統(tǒng)特點
基于快速原型控制的五自由度磁懸浮軸承實驗系統(tǒng)采用5自由度磁懸浮試驗臺,基于SIC的開放式功率硬件與快速原型控制控制器構(gòu)成,使得系統(tǒng)能夠更快更高效的進(jìn)行算法驗證與迭代。
1、5自由度磁懸浮軸承系統(tǒng),磁軸承和驅(qū)動電機(jī)在非工作狀態(tài)下,轉(zhuǎn)子軸兩端靠重力分別停靠在徑向磁軸承組件 A 和徑向磁軸承組件 B 中的保護(hù)軸承上。當(dāng)系統(tǒng)啟動后,首先會啟動磁軸承工作,磁軸承轉(zhuǎn)子軸會懸浮在磁軸承中心,磁軸承轉(zhuǎn)子軸同磁軸承組件脫離接觸。當(dāng)系統(tǒng)顯示懸浮正常時,開啟驅(qū)動電機(jī)的控制器,轉(zhuǎn)子軸可在驅(qū)動電機(jī)的帶動下進(jìn)行高速旋轉(zhuǎn)。
2、基于SIC的開放式功率硬件,系統(tǒng)采用SIC功率器件,可以有較高的開關(guān)頻率,功率硬件可以輸出較高的交流頻率,可以適應(yīng)更高轉(zhuǎn)速的控制。
3、采用YXSPACE-SP6000快速原型控制器控制,從SIMULINK模型到控制器執(zhí)行代碼一鍵生成,可以快速驗證與迭代控制算法。
4、提供系統(tǒng)控制的開源例程,用戶在例程基礎(chǔ)上可以更高效的理解系統(tǒng)以及進(jìn)行算法迭代創(chuàng)新設(shè)計。
系統(tǒng)典型配置清單
表1 系統(tǒng)典型配置清單
| 序號 | 產(chǎn)品名稱 | 備注 |
| 1 | 磁軸承測試臺架 | 1、驅(qū)動電機(jī)功率:600W 2、最高工作轉(zhuǎn)速:12000rpm 3、轉(zhuǎn)速調(diào)節(jié)范圍: 0-12000rpm 4、輸入電壓:380 VAC 5、最大運行電流: 7A 6、磁軸承最大承載力(單個徑向):250N 7、位移傳感器精度:1um 8、系統(tǒng)包含2個徑向磁軸承、1個軸向磁軸承,及其保護(hù)軸承,轉(zhuǎn)軸,亞克力護(hù)罩與底座,含電渦流位移傳感器2套等 9、平臺重量:72kg |
| 2 | 功率驅(qū)動器 | 1、驅(qū)動部分采用SIC 2、電機(jī)驅(qū)動采用三相兩電平 3、磁軸承采用6路三相橋 4路徑向,2路軸向; 4.在硬件上采用分體化設(shè)計,控制板、采集板、功率板、電容板等模塊化,外殼采用透明的亞克力板材,美觀實用,用戶可以方便觀察內(nèi)部的硬件結(jié)構(gòu)。同時頂蓋可以打開,方便進(jìn)行相關(guān)信號的測量。 ★5.開放設(shè)計:開放給用戶硬件原理圖、硬件設(shè)計說明以及軟件模塊底層驅(qū)動,開放控制板的debug接口,客戶可以燒寫自己的程序。 6.安全穩(wěn)定:設(shè)計了健全的保護(hù)機(jī)制,軟件方面有過壓保護(hù)、欠壓保護(hù)、過流速斷保護(hù)、IGBT過熱保護(hù)、通訊保護(hù)等;硬件方面有短路保護(hù)、IGBT過流保護(hù)等。 7.人機(jī)交互:具備7寸觸控屏,可以查詢模塊的狀態(tài)信息,電壓電流數(shù)據(jù)和波形,模式切換。 ★8。具備獨立的DSP控制板,可以獨立運行,同時可外接快速原型控制器,方便與YXspace控制器及其他通用控制器或者數(shù)字實時仿真器對接,提供相應(yīng)的數(shù)字轉(zhuǎn)接板。 |
| 3 | YXSPACE-SP6000 | 1、支持Simulink代碼自動生成和基于模型的程序設(shè)計;算法的Simulink模型可直接仿真下載到快速原型控制器的過程,能方便地使用Matlab/Simulink進(jìn)行控制算法設(shè)計并在線實時仿真的功能,無需了解軟硬件實現(xiàn)及編程過程,就能進(jìn)行控制設(shè)計和調(diào)試。 ★2、控制器需采用雙DSP+FPGA雙核結(jié)構(gòu),采用TI公司的C6000系列DSP作為核心控制器,多個FPGA作為輔助控制器,運算能力可達(dá)3648MIPS,浮點運算。 3、具備自主編寫的驅(qū)動庫,可以直接導(dǎo)入到Simulink庫中,用戶可以直接在Matlab軟件中拖動相應(yīng)的硬件元件庫,將模型中的數(shù)據(jù)直接與硬件對接,無需再花費時間去查詢硬件映射。多種庫文件,可適用于各種工程調(diào)試需求。 4、用戶可以隨意拖拽即可完成與硬件的連接,同時,配套了組態(tài)式的上位機(jī),可以查看模型中任何的中間變量,可隨時觀測各種關(guān)鍵變量,從而做出相應(yīng)參數(shù)上的更改。 5、需采用總線擴(kuò)展方式,采用插卡方式,各個子板卡可進(jìn)行擴(kuò)展,不接受單板卡方式。采用插卡式結(jié)構(gòu),用戶根據(jù)實際功能需求,可以靈活配置板卡種類,基本配置是CPU板卡、模擬采集ADC板卡、模擬輸出DAC板卡、數(shù)字輸出DO板卡、數(shù)組輸入DI板卡、脈寬調(diào)制PWM板卡、正交編碼QEP板卡 |
| 4 | 基于模型開發(fā)快速原型監(jiān)控系統(tǒng) | ★1、將Simulink模型與快速原型控制器硬件結(jié)合在一起,下載到控制器中執(zhí)行,控制器運行過程中,此軟件可以將Simulink模型中想要查看的各類控制量直觀顯示,也可以隨時修改各類控制參數(shù),讓控制器實時響應(yīng),從而實現(xiàn)了真正的在線仿真。 ★5、系統(tǒng)需具備以下配置功能: |
| 5 | 開放式功率硬件開發(fā)系統(tǒng) | ★1、基于simulink的永磁同步電機(jī)的控制的模型例程 ★2、磁懸浮軸承控制 ★3、系統(tǒng)調(diào)試,含系統(tǒng)上位機(jī) |
| 6 | 高精度可編程直流電源 | 1、輸入電壓:380V(AC) 2、輸入電流: 10A(AC) 3、功率因數(shù):0.97 4、頻率范圍:45Hz-65Hz ★5、輸出電壓:50-800V(直流) 6、電流范圍:0-10A 7、功率范圍:0-5kW ★8、電壓精度:±0.5% F.S. ★9、電流精度:±1% F.S. 10、電壓測量分辨率:0.1V 11、電流測量分辨率:0.1A 12、功率測量分辨率:0.001kW ★13、可編程響應(yīng)時間滿載20ms,空載10ms 14、含上位機(jī)配置軟件 ★15、本地7寸彩色觸控屏(800 x 480分辨率) 16、通信接口:RS485 17、冷卻方式:強(qiáng)制風(fēng)冷 18、風(fēng)扇控制方式:溫控調(diào)速 ★19、保護(hù):OCP,OVP,OPP,OTP |
主要設(shè)備參考說明
磁軸承測試臺架
磁懸浮測試臺架主要由驅(qū)動電機(jī)、徑向磁軸承總成 A、軸向磁軸承總成、徑向磁軸承總
成 B、底座總成、轉(zhuǎn)子軸、護(hù)罩等主要部件組成,旋轉(zhuǎn)部件為轉(zhuǎn)子軸,由驅(qū)動電機(jī)直接驅(qū)動旋轉(zhuǎn),其他部件為靜止件。兩套位移傳感器組件分別置于徑向磁軸承總成 A 和徑向磁軸承總成 B 中.參考圖如圖所示
臺架的基本工作原理:磁軸承和驅(qū)動電機(jī)在非工作狀態(tài)下,轉(zhuǎn)子軸兩端靠重力分別停靠在徑向磁軸承組件 A 和徑向磁軸承組件 B 中的保護(hù)軸承上。當(dāng)系統(tǒng)啟動后,首先會啟動磁軸承工作,磁軸承轉(zhuǎn)子軸會懸浮在磁軸承中心,磁軸承轉(zhuǎn)子軸同磁軸承組件脫離接觸。當(dāng)系統(tǒng)顯示懸浮正常時,開啟驅(qū)動電機(jī)的控制器,轉(zhuǎn)子軸可在驅(qū)動電機(jī)的帶動下進(jìn)行高速旋轉(zhuǎn)。
系統(tǒng)主要參數(shù)如下:
1、驅(qū)動電機(jī)功率:600W
2、最高工作轉(zhuǎn)速:12000rpm
3、轉(zhuǎn)速調(diào)節(jié)范圍: 0-12000rpm
4、輸入電壓:380 VAC
5、最大運行電流: 7A
6、磁軸承最大承載力(單個徑向):250N
7、位移傳感器精度:1um
8、系統(tǒng)包含2個徑向磁軸承、1個軸向磁軸承,及其保護(hù)軸承,轉(zhuǎn)軸,亞克力護(hù)罩與底座,含電渦流位移傳感器2套等
9、平臺重量:72kg
功率驅(qū)動器
基于快速原型控制的五自由度磁懸浮軸承實驗系統(tǒng)的功率驅(qū)動部分包含了電機(jī)驅(qū)動與磁軸承驅(qū)動,功率硬件皆采用SIC,可以有較高的開關(guān)頻率,能夠適應(yīng)更高轉(zhuǎn)速控制,采用模塊化設(shè)計,內(nèi)部的模塊比較容易替換,可以進(jìn)行一些模塊替換后的比對研究。
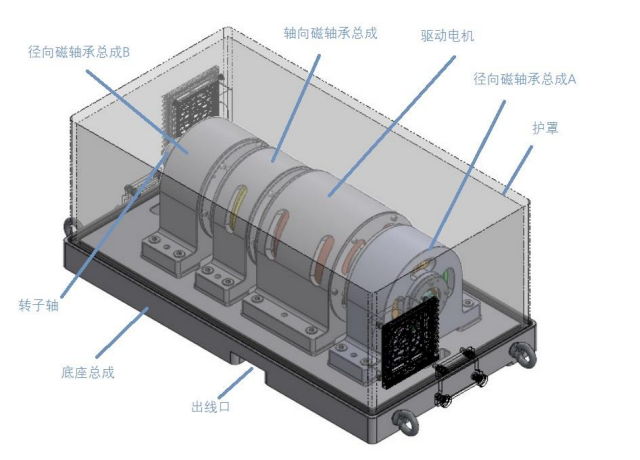
電機(jī)驅(qū)動部分采用SIC,三相兩電平,YXPHM-TP205b采用基于模型設(shè)計的理念,脫胎于研旭成熟產(chǎn)品光伏并網(wǎng)逆變器與風(fēng)機(jī)變流器等成熟產(chǎn)品,又結(jié)合了研旭多年的模塊化組件與開放式平臺研發(fā)經(jīng)驗,對該拓?fù)浣Y(jié)構(gòu)與驅(qū)動電路、傳感器電路、信號處理電路進(jìn)一步集成。三相橋式全控型變流器在新能源變流器、電機(jī)控制、電能質(zhì)量控制等應(yīng)用中都非常廣泛,其主要由SIC、二極管、驅(qū)動電路、CPU信號處理單元、繼電器、熔斷器、傳感器、散熱器、電容等組成。其拓?fù)浣Y(jié)構(gòu)如圖所示
主控CPU采用目前流行的DSP,型號為TI公司的TMS320F28335,其32位浮點處理能力,非常適用于變流器控制場合。通過傳感器分別采集三相交流電流、三相交流電壓、直流側(cè)電壓、電流以及溫度等信息送給DSP,然后DSP經(jīng)過特定的算法,輸出PWM調(diào)制波控制開關(guān)器件,從而可以實現(xiàn)直流變交流或者交流變直流能量雙向流動。除此之外,信號處理電路還預(yù)留的外部控制器接口,方便對接RCP控制器,如DSPACE、RT-LAB、SPEEDGOAT、PLEX、YXSPACE等。
YXPHM-TP210b-III主要參數(shù)表
YXPHM-TP210b-III(Sic碳化硅) | ||
| 序號 | 參數(shù) | 參數(shù)值 |
| 1 | 額定功率 | 10kW |
| 2 | 直流電壓 | ≤800Vdc |
| 3 | 直流電流 | ≤17A |
| 4 | 交流電壓 | ≤450Vac |
| 5 | 交流電流 | ≤16A |
| 6 | 開關(guān)頻率 | ≤100kHz |
| 7 | 橋臂電抗 | 2mH |
| 8 | 效率 | ≤96% |
| 9 | 死區(qū) | 200ns |
| 10 | 工作環(huán)境溫度 | -5℃至45℃ |
| 11 | 電流傳感器范圍 | 直流電流≤25A 交流電流≤100A |
下圖為用亞克力材料封裝。尺寸為:428*312*240mm(長寬高),可以平放在桌子上面,故稱作桌面型功率模塊。

YXPHM-TP210b-I實物圖
功率模塊硬件板卡方面主要由主控單元、采集調(diào)理單元、功率單元(包含功率模塊、散熱、變壓器、濾波等)、接口單元和人機(jī)界面等組成.
YXSPACE-SP6000
研旭公司推出的YXSPACE產(chǎn)品系列,能夠?qū)⒂脩粼O(shè)計的圖形化的高級語言編寫的控制算法(Simulink)轉(zhuǎn)換成DIDO、AIAO量,完成實際硬件控制。同時通過YX-VIEW6000監(jiān)控組態(tài)軟件,對控制器進(jìn)行實時監(jiān)控,從而完成模型的調(diào)試與驗證。其基本控制框圖如下所示:
快速原型開發(fā)流程示意
控制算法模型一般采用Matlab中的Simulink工具搭建,將模型中的接口與硬件驅(qū)動接口綁定后,通過編譯工具產(chǎn)生可執(zhí)行文件,下載至SP6000快速原型控制器中運行。對被控對象進(jìn)行實際控制。
研旭SP6000快速原型控制器配套軟件YXSPACE-VIEW6000(以下簡稱VIEW6000)主要用于配置快速原型控制器外設(shè)的工作模式,同時可以實時監(jiān)測控制過程中的各類運行量,包括采集量、中間控制變量等。另外此軟件集成了保護(hù)機(jī)制,用戶只需要設(shè)置硬件運行中的極限值,快速原型控制器就會按照此極限值進(jìn)行實時判斷,一旦超過,快速原型控制器會自動停止運行,以達(dá)到保護(hù)后極功率電路的目的。
研旭SP6000快速原型控制器,采用插卡式結(jié)構(gòu),基本配置包含CPU板卡、2塊模擬采集ADC板卡、模擬輸出DAC板卡、數(shù)字輸出DO板卡、數(shù)組輸入DI板卡、兩塊脈寬調(diào)制PWM板卡、正交編碼QEP/捕獲CAP板卡。其板卡配置安裝圖如下:
| YXSPACE-SP6000背面圖 | YXSPACE-SP6000資源描述 |
 | 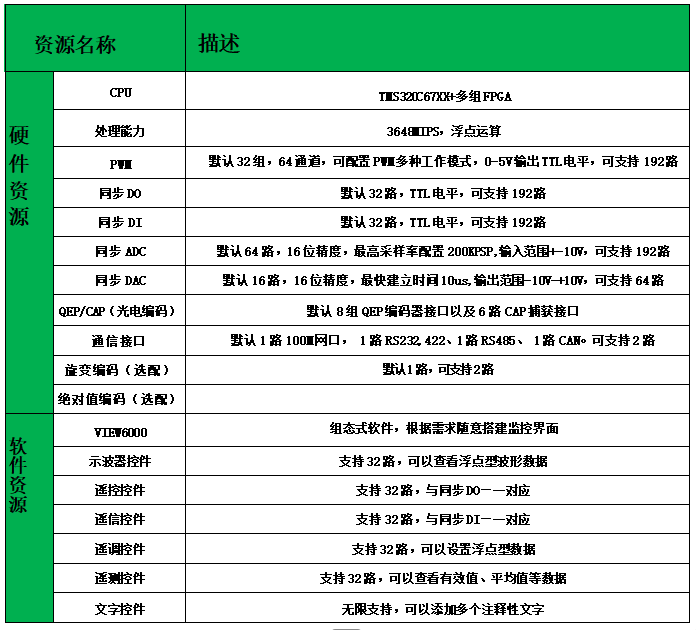 |
YXSPACE獨特優(yōu)點
◆ 采用高端DSP芯片作為主運算核心,仿真速度更快,資源更豐富,其仿真結(jié)果針對實際研究更具有參考性;
◆ 在Matlab中設(shè)計的控制算法自動生成代碼,自動加載到實時目標(biāo)機(jī)中運行,避免了繁瑣的編程和調(diào)試工作;
◆ 使用門檻低,會Matlab仿真即可完成實驗測試工作,所有測試工作只需一人即可完成
◆ 保護(hù)機(jī)制齊全,此部分不需要用戶實際搭建保護(hù)模型,只需配置控制量的極限值即可實現(xiàn)實時保護(hù),讓用戶不用為安全保護(hù)費心,更多的關(guān)注于核心控制算法;
◆ 模型與硬件接口鏈接簡單,只需記住端口編號即可,更不用配置硬件各類細(xì)節(jié),免去一切不必要的麻煩;
◆ 性價比高,在同等功能的前提下,YXSPACE成本更低。
◆ 具備自主編寫的驅(qū)動庫,可以直接導(dǎo)入到Simulink庫中,用戶可以直接在Matlab軟件中拖動相應(yīng)的硬件元件庫,將模型中的數(shù)據(jù)直接與硬件對接,無需再花費時間去查詢硬件映射。多種庫文件,可適用于各種工程調(diào)試需求。
◆ 用戶可以隨意拖拽即可完成與硬件的連接,同時,配套了組態(tài)式的上位機(jī),可以查看模型中任何的中間變量,可隨時觀測各種關(guān)鍵變量,從而做出相應(yīng)參數(shù)上的更改。
基于模型開發(fā)快速原型監(jiān)控系統(tǒng)
研旭公司專門為SP6000研發(fā)了一套上位機(jī)監(jiān)控軟件VIEW6000軟件,采用組態(tài)式交互界面,方便用戶靈活、方便的查看快速原型控制器的工作信息。
VIEW6000軟件中包含控制器設(shè)置以及組態(tài)區(qū)。其中控制器設(shè)置界面共有4類控制器設(shè)置,包括仿真步長設(shè)置,DO控制源設(shè)置,QEP/CAP模式設(shè)置,PWM模塊設(shè)置。

圖 VIEW6000配置界面
組態(tài)區(qū)主要包括功能按鈕、組態(tài)控件、工作區(qū)等。
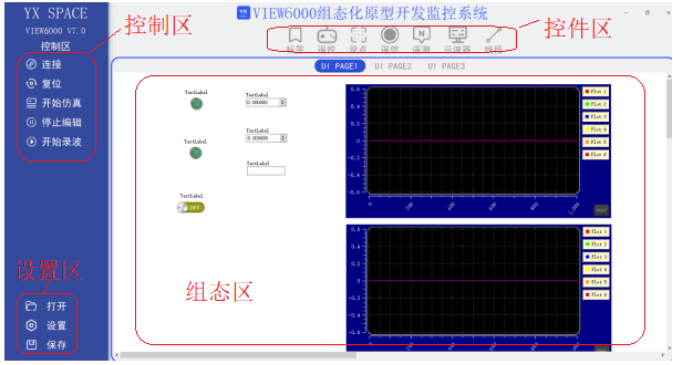
圖 VIEW6000組態(tài)界面
在實際應(yīng)用中,很多用戶會提及,模型轉(zhuǎn)換的文件是否透明?是否可以查看最終的源代碼?答案是肯定的,用戶可以查看、編輯轉(zhuǎn)換后源代碼,換句話說simulink內(nèi)部自帶的算法模塊,可以透明的轉(zhuǎn)換成源代碼呈現(xiàn)在用戶面前。
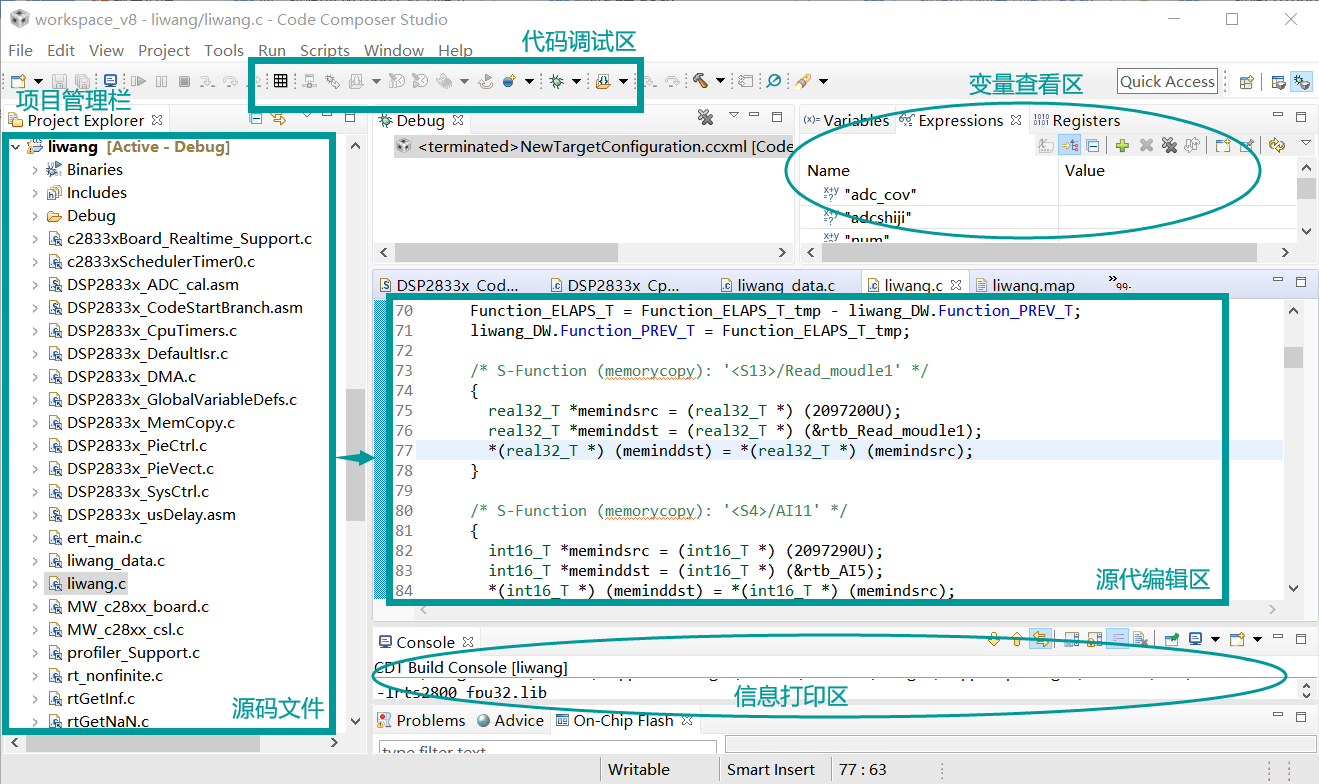
圖 生成代碼查看
開放式功率硬件開發(fā)系統(tǒng)
當(dāng)前,YXSPACE系列快速原型控制器備受大家關(guān)注,由于其支持模型下載功能,非常快捷、方便的驗證控制算法。因此為了提高功率模塊的使用場合,特將功率模塊的模擬采集部分以及數(shù)字控制部分通過DB25接口外擴(kuò)出來,直接與RCP控制器對接,便于RCP直接控制。
圖 YXPHM-TP210b與SP6000仿真機(jī)實物圖
研旭研發(fā)的YXPHM系列產(chǎn)品最大的特點就是開放性,目的是全面支撐用戶二次開發(fā)。所能提供的資料為:
所有硬件圖紙,包含原理圖和PCB圖(PDF格式);
內(nèi)部布線圖;
DSP運行源代碼,包含但不限于程序主框架、硬件驅(qū)動功能、硬件配置功能、通訊功能、保護(hù)功能、編碼器功能、采樣功能、濾波函數(shù)、控制算法等(選配);
設(shè)備操作說明書;
硬件開發(fā)設(shè)計說明;
軟件開發(fā)設(shè)計說明(需選配軟件資源開放);
用戶獲取以上資料后,可以從硬件、軟件兩個方面進(jìn)行深度研究,硬件方面可以了解這類變流器的設(shè)計思路,以及一些特定成熟的電路。軟件方面不僅可以從編程技巧等基礎(chǔ)方面獲取經(jīng)驗,而且更可以從探究、驗證自己的控制算法等理論方面獲得成果。
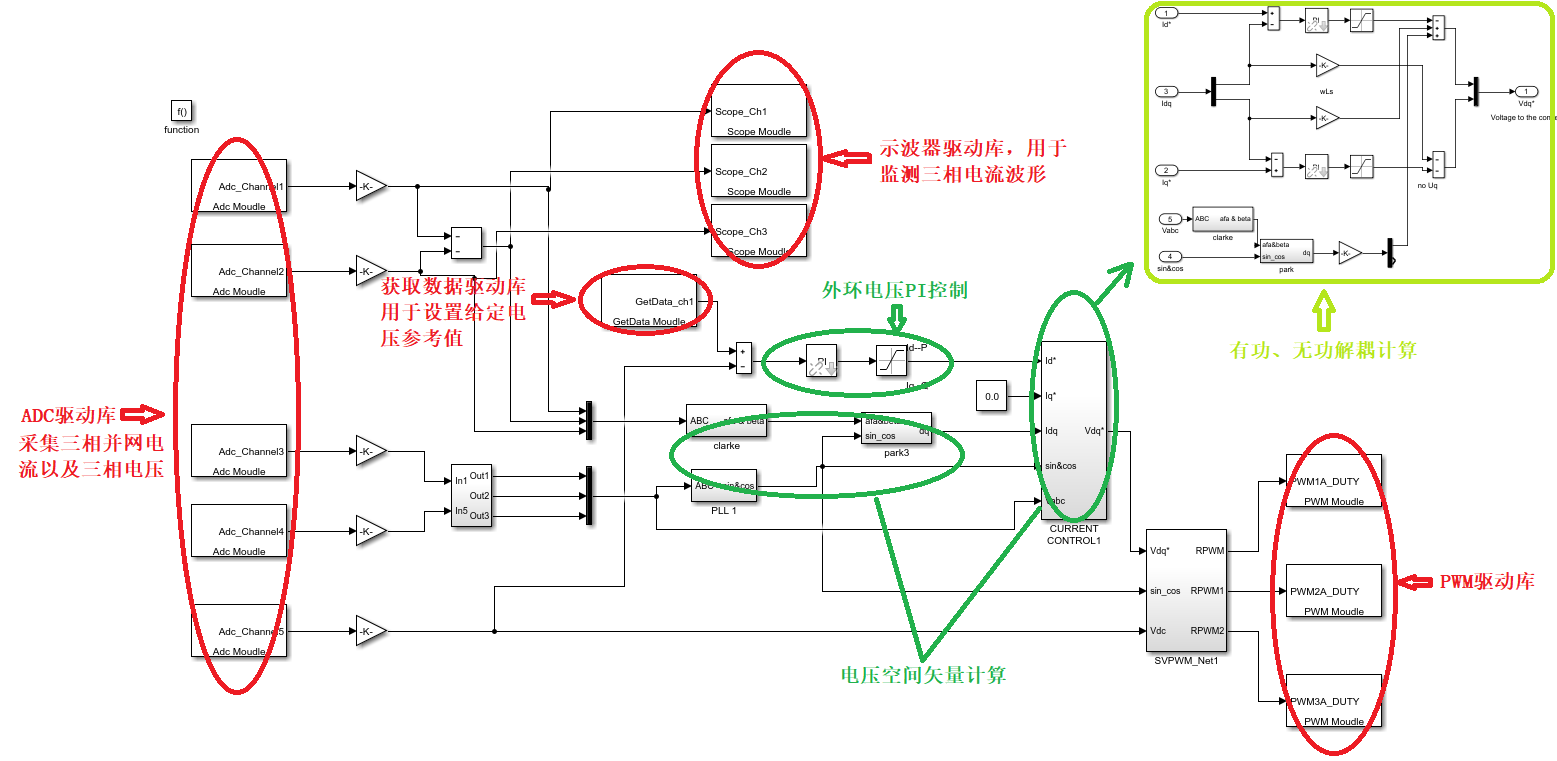
例程示意:
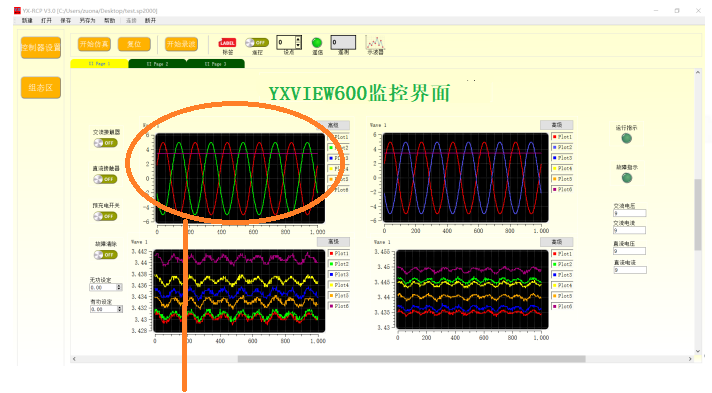
監(jiān)控示意:
高精度可編程直流電源
研旭YXPHD系列高壓大功率可編程直流電源采用全數(shù)字控制技術(shù),在4U機(jī)箱體積內(nèi)功率可實現(xiàn)20kVA,輸出電壓可達(dá)到750V,輸出電流可達(dá)到25A-50A。
研旭YXPHD系列可編程直流電源帶主動式PFC,功率因素高達(dá)0.99,是采用PWM技術(shù)的高頻開關(guān)式直流電源,模塊化設(shè)計,采用先進(jìn)的DSP數(shù)字控制技術(shù),具有恒壓、恒流、恒功率模式輸出,可自動交叉變換,維持控制與保護(hù)兼顧特性,確保直流電源輸出的高精度、低紋波、快速瞬態(tài)響應(yīng),且效率高達(dá)93%;產(chǎn)品主要定位于電子電力生產(chǎn)、蓄電池行業(yè)、PCB板制造行業(yè)及通訊、PLC供電、機(jī)電老化試驗、自動測試系統(tǒng)集成、醫(yī)療器械、工業(yè)、電池充電及模擬、混合動力汽車與光伏逆變器測試研究單位、實驗室對高精度直流電源的需求。

系統(tǒng)特性
? 功率容量5kW-20kW,輸出電壓可達(dá)50V-750V,輸出電流可達(dá)25A~100A
? 高頻隔離,帶主動PFC功能,滿載功率因數(shù)0.99;
? 最大工作效率≧95.8% 滿載工作效率可達(dá)≧95.2%;
? 采用7寸液晶觸摸顯示屏;
? 全數(shù)位設(shè)計,輸出電壓、電流及功率測量顯示功能;
? 支持輸入過/欠壓保護(hù)、輸入過流保護(hù);
? 支持輸出過壓,過流短路保護(hù)功能、以及過溫度保護(hù)功能;

微信公眾號





