-
關(guān)于研旭
于研旭")
-

-
服務(wù)支持
支持")
品展示")

目案例")

YXMBD-ZP15基于半實(shí)物原型開(kāi)發(fā)直流無(wú)刷電機(jī)驅(qū)動(dòng)控制系統(tǒng)
關(guān)鍵詞:
基于半實(shí)物原型開(kāi)發(fā)
開(kāi)發(fā)直流無(wú)刷電機(jī)驅(qū)動(dòng)控制系統(tǒng)
所屬分類:
電機(jī)驅(qū)動(dòng)測(cè)試與實(shí)驗(yàn)
機(jī)電測(cè)控臺(tái)架
聯(lián)系我們
方案介紹
1、設(shè)備組成

2、 技術(shù)參數(shù)
2.1 直流無(wú)刷電機(jī)對(duì)拖平臺(tái)
技術(shù)參數(shù)如下:
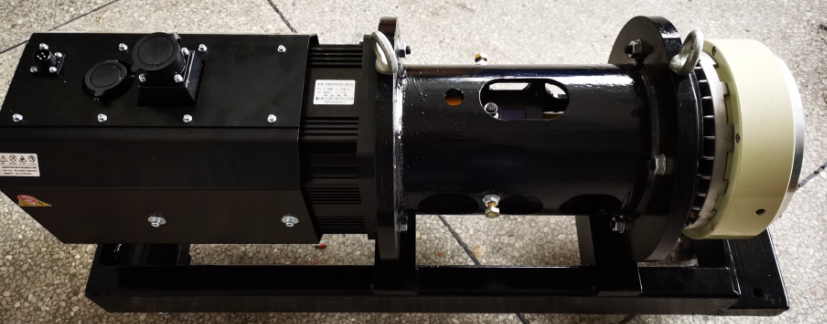
1)平臺(tái)由驅(qū)動(dòng)電機(jī)(永磁同步電機(jī))、高速精密聯(lián)軸器、轉(zhuǎn)速/扭矩傳感器(選配)、磁粉制動(dòng)器組成,用于實(shí)現(xiàn)電機(jī)對(duì)拖實(shí)驗(yàn);
2)可以實(shí)現(xiàn)速度控制和阻力控制,驅(qū)動(dòng)電機(jī)和磁粉制動(dòng)器以聯(lián)軸器相連,
3)直流無(wú)刷驅(qū)動(dòng)電機(jī):直流無(wú)刷電機(jī),額定功率1.5KW,額定線電壓48V,額定電流40,額定轉(zhuǎn)矩4.8 NM,額定轉(zhuǎn)速3000 r/min,空載轉(zhuǎn)速4000 r/min,重量 5.5KG,極對(duì)數(shù)8,霍爾傳感器。
4)磁粉制動(dòng)器:?jiǎn)屋S制動(dòng),額定轉(zhuǎn)矩50NM,電壓24V,額定轉(zhuǎn)速1500 r/min,最大電流1.8A,張力控制器3A。
5)扭矩/轉(zhuǎn)速傳感器:轉(zhuǎn)速范圍:0-2000rpm,扭矩測(cè)量范圍:0-200NM;
6)槽鋼底座帶橡膠墊,電機(jī)拖動(dòng)組總尺寸1000*30*40(長(zhǎng)*寬*高)
2.2 電機(jī)驅(qū)動(dòng)背靠背變頻柜
兩個(gè)PWM變換器各司其職,根據(jù)控制算法的不同其功能略有不同。無(wú)論哪種算法,定子PWM變換器一般是采用轉(zhuǎn)子磁鏈定向,控制PMSG的定子電流呈正弦波形實(shí)現(xiàn)轉(zhuǎn)速和功率因數(shù)調(diào)節(jié);并網(wǎng)PWM變換器采用電網(wǎng)電壓矢量定向,將直流電逆變?yōu)榱己玫恼也ㄐ螌?shí)現(xiàn)并網(wǎng)和有功/無(wú)功解耦。直流母線電壓可以由定子PWM變換器控制也可以由并網(wǎng)PWM變換器控制,保持為比電網(wǎng)幅值高的穩(wěn)定值(這樣才能保證能量流動(dòng)的方向,PWM整流可以升壓)以便往電網(wǎng)輸送能量。
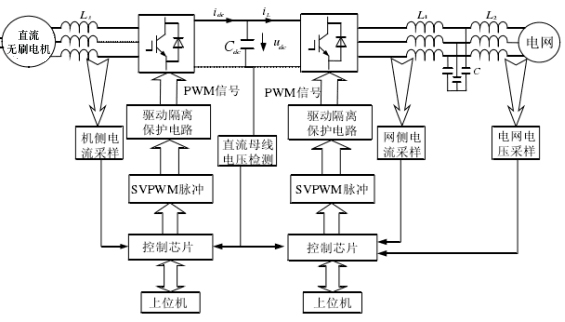
圖2 背靠背驅(qū)動(dòng)變流器構(gòu)架
主控CPU采用目前流行的DSP,型號(hào)為TI公司的TMS320F28335,其32位浮點(diǎn)處理能力,非常適用于變流器控制場(chǎng)合。通過(guò)傳感器分別采集三相交流電流、三相交流電壓、直流側(cè)電壓、電流以及溫度等信息送給DSP,然后DSP經(jīng)過(guò)特定的算法,輸出PWM調(diào)制波控制開(kāi)關(guān)器件,從而可以實(shí)現(xiàn)直流變交流或者交流變直流能量雙向流動(dòng)。除此之外,信號(hào)處理電路還預(yù)留的外部控制器接口,方便對(duì)接RCP控制器。
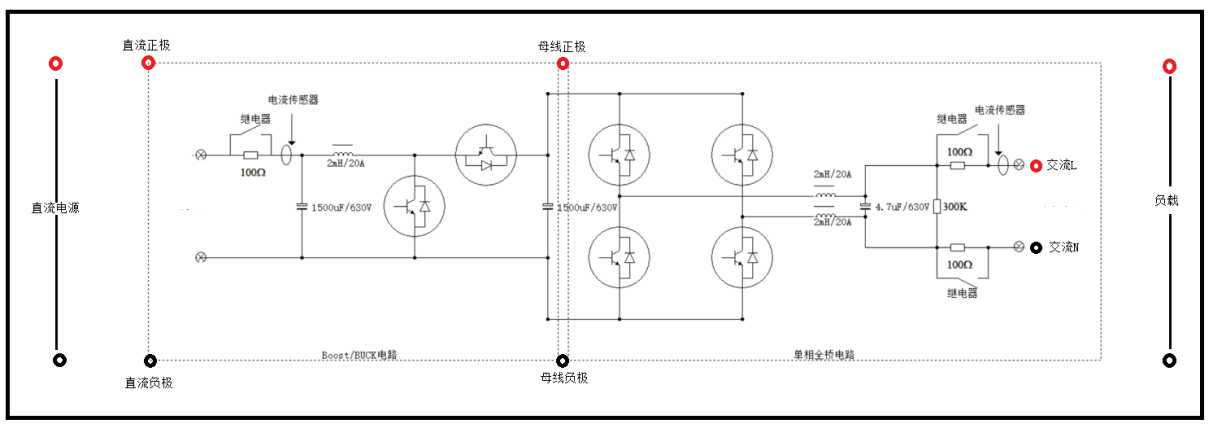
1、可提供直流輸入和交流輸入兩種方式,交流輸入:380V電網(wǎng),直流輸入:電壓60V。
2、運(yùn)行方式,滿足三種工作模式:電機(jī)驅(qū)動(dòng)模式、變流并網(wǎng)模式、RCP外接控制模式。
3、開(kāi)放硬件原理圖,PCB圖(PDF),DSP控制板完整CCS工程源代碼(選配)。 4、將Simulink模型與快速原型控制器硬件結(jié)合在一起,下載到控制器中執(zhí)行,控制器運(yùn)行過(guò)程中,此軟件可以將Simulink模型中想要查看的各類控制量直觀顯示,也可以隨時(shí)修改各類控制參數(shù),讓控制器實(shí)時(shí)響應(yīng),從而實(shí)現(xiàn)了真正的在線仿真。
5、在線仿真運(yùn)行界面,采用組態(tài)方式,科研者根據(jù)自己需求,可以隨意添加控件,讓科研者將精力放到Simulink建模上面。
6、軟件具備三類設(shè)置,包括通信IP、板卡的數(shù)量設(shè)置;PWM設(shè)置,主要指示PWM的頻率值,死區(qū)值,以及動(dòng)作有效值,編碼器精度值等;顯示界面設(shè)置,用于最終的數(shù)據(jù)查看以及設(shè)置。顯示界面中包括遙控、遙調(diào)、遙信、遙測(cè)、示波器控件。
7、提供電機(jī)控制側(cè)的simulink算法模型,控制模型完全開(kāi)放且可修改,用戶可直接使用。
8、具備DSP輔助控制器,配合外圍信號(hào)采集調(diào)理電路、IO驅(qū)動(dòng)電路等組成。

完成以下功能:
·各類信號(hào)的采集調(diào)理,送給主控制器以及自身使用。送給主控制器目的是實(shí)現(xiàn)算法控制,自身采集主要用于對(duì)系統(tǒng)的實(shí)時(shí)保護(hù)。
·對(duì)IO信號(hào)的驅(qū)動(dòng)管理,將主控制器輸出信號(hào)管理后輸出給功率變換電路,實(shí)現(xiàn)控制,同時(shí)檢測(cè)系統(tǒng)運(yùn)行情況,一旦發(fā)生錯(cuò)誤,通過(guò)對(duì)IO管理,就可以封閉主控制器的控制信號(hào),從而達(dá)到保護(hù)系統(tǒng)的作用。這可以保證科研者在建立模型時(shí),即使發(fā)生錯(cuò)誤控制,也可以保證設(shè)備不受損壞。這樣可以保證科研者不用顧慮錯(cuò)誤而導(dǎo)致設(shè)備損壞。
·配合監(jiān)控軟件,可以直觀設(shè)備查看運(yùn)行參數(shù)。
·本身就可以實(shí)現(xiàn)算法控制,用于對(duì)比仿真效果
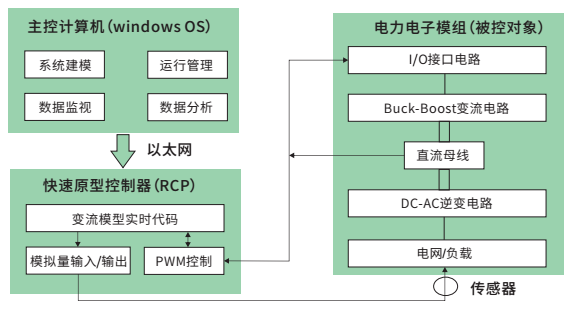
2.3 快速原型控制器——YXSPACE

研旭公司推出的YXSPACE產(chǎn)品系列,能夠?qū)⒂脩粼O(shè)計(jì)的圖形化的高級(jí)語(yǔ)言編寫的控制算法(Simulink)轉(zhuǎn)換成DIDO、AIAO量,完成實(shí)際硬件控制。其基本控制框圖如下所示:
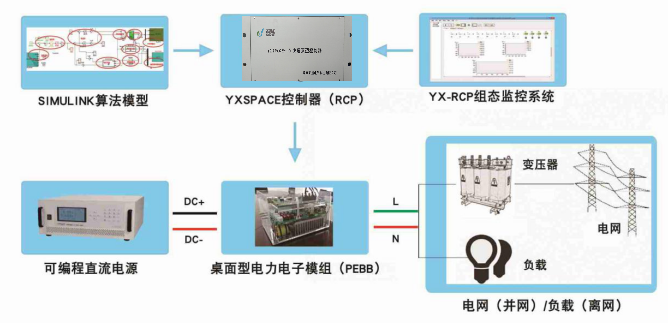
控制算法模型一般采用Matlab中的Simulink工具搭建,將模型中的接口與硬件驅(qū)動(dòng)接口綁定后,再結(jié)合TI公司的CCS編譯工具產(chǎn)生可執(zhí)行文件,下載至YXSPACE控制器中運(yùn)行。
研旭YXSPACE-VIEW2000軟件主要用于配置YXSPACE控制器工作模式,同時(shí)可以實(shí)時(shí)監(jiān)測(cè)控制過(guò)程中的各類運(yùn)行量,包括采集量、中間控制變量等。YXSPACE-VIEW2000包括了6類組態(tài)控件,分別為遙控控件、遙信控件、遙調(diào)控件、遙測(cè)控件、示波器控件以及文字編輯控件等。用戶可以借助這些控件,直觀、方便的搭建監(jiān)控界面,監(jiān)控控制器內(nèi)部運(yùn)行的詳細(xì)信息。
3.SP2000控制器資源
研旭SP2000采用外擴(kuò)插卡式結(jié)構(gòu),簡(jiǎn)潔輕便,板卡資源如下:

4.實(shí)物圖片 :
5.YXSPACE獨(dú)特優(yōu)點(diǎn)
(1)采用目前市面成品常用的控制芯片作為CPU,其仿真結(jié)果針對(duì)實(shí)際研究更具有參考性;
(2)在Matlab中設(shè)計(jì)的控制算法自動(dòng)生成代碼,自動(dòng)加載到實(shí)時(shí)目標(biāo)機(jī)中運(yùn)行,避免了繁瑣的編程和Debug工作
(3)使用門檻低,會(huì)Matlab仿真即可完成實(shí)驗(yàn)測(cè)試工作,所有測(cè)試工作只需一人即可完成
(4)模型與硬件接口鏈接簡(jiǎn)單,只需記住端口編號(hào)即可,更不用配置硬件各類細(xì)節(jié),免去一切不必要的麻煩;
(5)性價(jià)比高,在同等功能的前提下,YXSPACE成本更低。
(6)具備自主編寫的驅(qū)動(dòng)庫(kù),可以直接導(dǎo)入到Simulink庫(kù)中,用戶可以直接在Matlab軟件中拖動(dòng)相應(yīng)的硬件元件庫(kù),將模型中的數(shù)據(jù)直接與硬件對(duì)接,無(wú)需再花費(fèi)時(shí)間去查詢硬件映射。8種庫(kù)文件,可適用于各種工程調(diào)試需求。
(7)模型轉(zhuǎn)換文件的透明化,用戶可直接查看模型轉(zhuǎn)換后的源碼。
6.YXSPACE-VIEW2000軟件
研旭公司專門為SP2000研發(fā)了一套上位機(jī)監(jiān)控軟件VIEW2000軟件。
VIEW2000軟件中包含控制器設(shè)置以及組態(tài)區(qū)。其中控制器設(shè)置界面共有4類控制器設(shè)置,包括仿真步長(zhǎng)設(shè)置,DO控制源設(shè)置,QEP/CAP模式設(shè)置,PWM模塊設(shè)置。
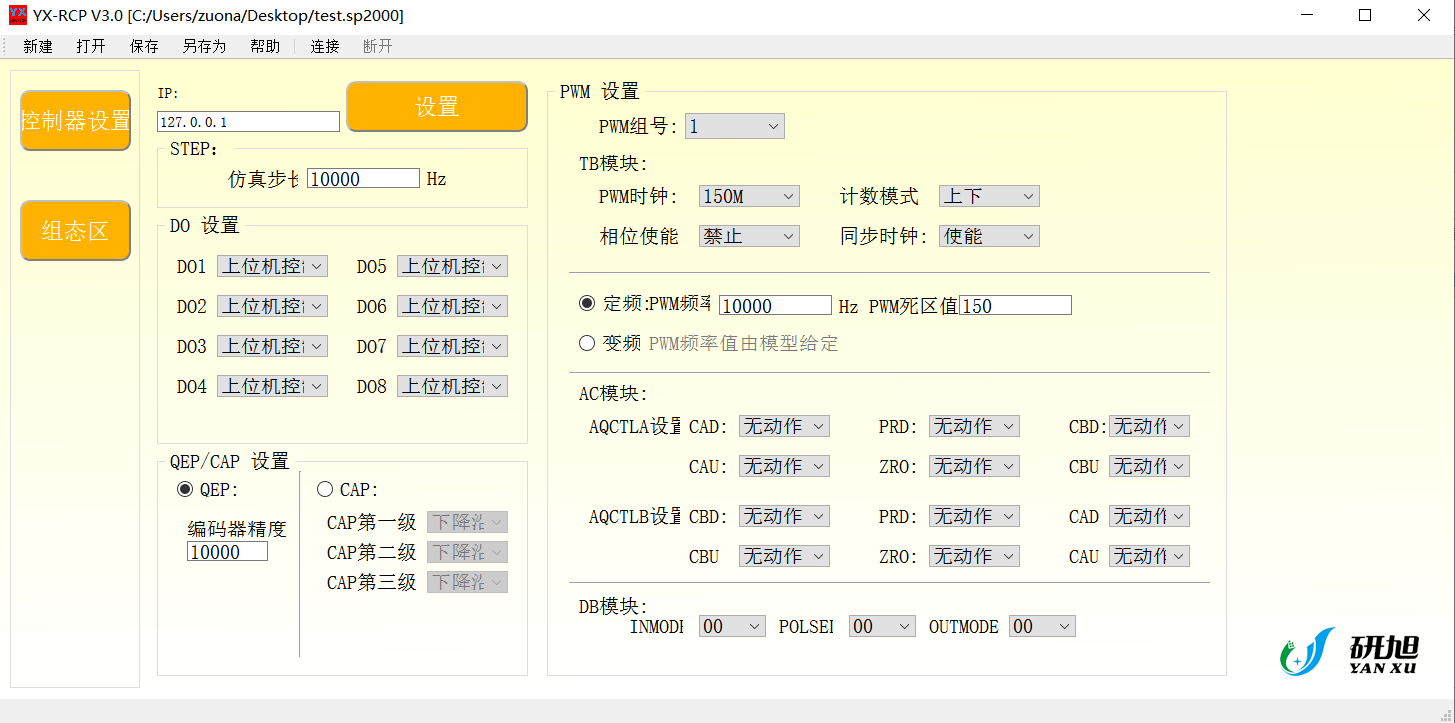
組態(tài)區(qū)主要包括功能按鈕、組態(tài)控件、工作區(qū)等。
在實(shí)際使用中,用戶只需用鼠標(biāo)拖動(dòng)各類控件,移至工作區(qū)當(dāng)中,位置根據(jù)需求隨意放置。雙擊控件即可設(shè)置控件的地址號(hào),這樣可完成控件與模型或者硬件的建立關(guān)系,操作及其簡(jiǎn)便。
包括如下幾類控件:
7.實(shí)物案例

微信公眾號(hào)





